Controller Area Network(CAN)은 1986년 독일의 Bosch사가 개발한 차량용 네트워크 프로토콜입니다. 자동차의 전자장치가 증가하면서 복잡해진 배선을 단순화하고 효율적인 통신을 위해 도입되었습니다. CAN은 높은 신뢰성과 실시간 데이터 전송이 가능하며, 노이즈에 강한 특성을 가지고 있습니다.

현재는 거의 모든 자동차에서 표준 통신 프로토콜로 사용되고 있으며, 산업 자동화 분야에서도 널리 활용되고 있습니다. 특히 자동차에서는 엔진 제어, 브레이크 시스템, 에어백 등 안전과 직결된 시스템들의 통신에 사용됩니다.
CAN 통신의 주요 특징
CAN 통신은 멀티마스터 방식과 브로드캐스트 통신을 기반으로 하며, CRC 체크와 ACK 필드를 통한 높은 신뢰성과 2선식 차동 신호 방식으로 노이즈 내성을 갖춘 통신 방식입니다.
- 멀티마스터 방식: 모든 노드가 동등한 권한을 가지고 통신할 수 있으며, 충돌 시 우선순위에 따라 조정됩니다.
- 브로드캐스트 통신: 모든 노드가 메시지를 수신할 수 있어 효율적인 데이터 공유가 가능합니다.
- 높은 신뢰성: CRC 체크, ACK 필드 등을 통한 오류 검출 및 복구 기능을 제공합니다.
- 실시간 통신: 우선순위 기반의 비파괴적 중재 방식으로 빠른 응답시간을 보장합니다.
- 유연한 확장성: 새로운 노드 추가가 용이하며 시스템 수정이 간단합니다.
- 고속 통신: CAN 2.0A/B 규격에 따라 최대 1Mbps까지 통신 속도를 지원합니다.
- 노이즈 내성: 차동 신호 방식을 사용하여 전기적 노이즈에 강합니다.
- 비용 효율성: 2선식 통신으로 배선을 줄이고 유지보수가 용이합니다.
Classical CAN은 이론상 최대 1Mbps의 속도를 지원하지만 실제 현장에서는 주로 500kbps로 운용되며, 이를 개선한 CAN-FD는 이론상 최대 8Mbps까지 지원하나 실제로는 2Mbps 정도로 사용됩니다.
CAN 통신의 충돌 회피 메커니즘
CAN 통신의 충돌 회피 메커니즘은 비파괴적 중재 방식(Non-destructive arbitration)을 통해 메시지 우선순위를 효과적으로 관리합니다. 이 시스템에서는 도미넌트(0)와 리세시브(1) 비트를 사용하여 여러 노드가 동시에 전송을 시도할 때 가장 낮은 ID를 가진 메시지가 자연스럽게 버스 접근 권한을 획득하며, 중재에서 진 노드들은 자동으로 수신 모드로 전환되어 나중에 재전송을 시도합니다. 이러한 메커니즘은 메시지 손실을 방지하고 버스 복구 시간이 필요하지 않아 실시간 통신의 신뢰성을 보장하며, 특히 높은 우선순위의 메시지가 즉시 전송될 수 있도록 보장합니다.
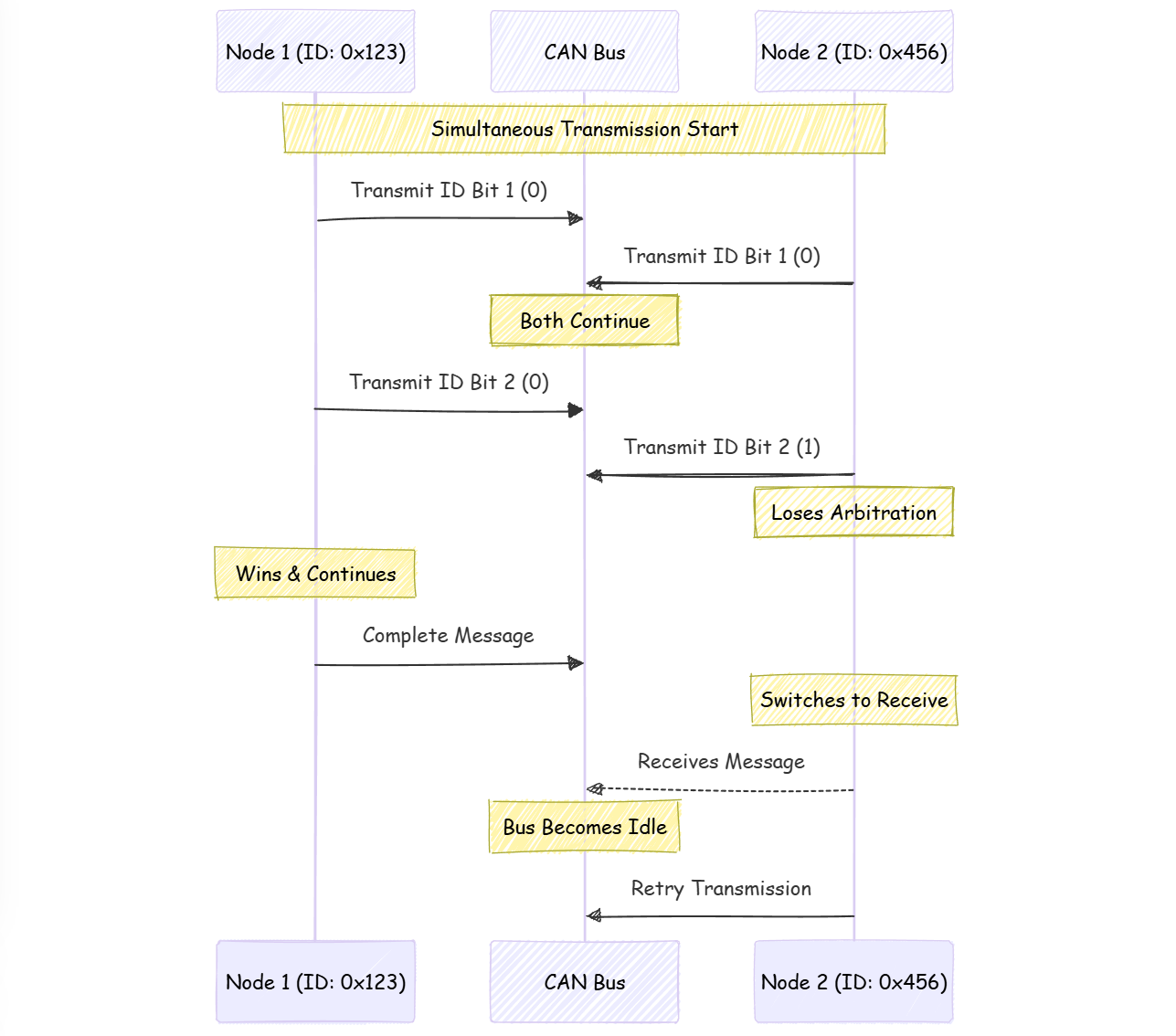
위 다이어그램은 두 노드 간의 중재 과정을 보여주며, 낮은 ID를 가진 노드가 어떻게 우선권을 얻고 다른 노드가 수신 모드로 전환되는지를 시각적으로 설명합니다.
CAN 통신의 하드웨어 구성
CAN 통신을 위한 기본적인 하드웨어 구성은 다음과 같습니다.
- CAN 컨트롤러: 메시지의 송수신을 제어하는 핵심 장치
- CAN 트랜시버: 차동 신호를 생성하고 수신하는 장치
- 터미네이션 저항: 신호 반사를 방지하기 위한 120Ω 저항
- 트위스트 페어 케이블: CAN_H와 CAN_L 신호선
차동 신호는 CAN_H와 CAN_L의 전압 차이를 이용하여 데이터를 전송합니다:
- Dominant(논리 0): CAN_H = 3.5V, CAN_L = 1.5V (차동전압 2V)
- Recessive(논리 1): CAN_H = CAN_L = 2.5V (차동전압 0V)
데이터 프레임 구조
CAN 통신의 데이터 프레임은 SOF로 시작하여 Arbitration, Control, Data, CRC, ACK 필드를 거쳐 EOF로 끝나는 구조로 설계되어 있습니다. 각 필드는 프레임의 시작과 끝을 알리고, 메시지 우선순위 결정, 데이터 길이 지정, 실제 데이터 전송, 오류 검출, 수신 확인 등의 고유한 역할을 수행합니다.

- SOF(Start of Frame): 프레임의 시작을 알리는 단일 비트
- Arbitration Field: 메시지 우선순위를 결정하는 ID 필드
- Control Field: 데이터 길이를 지정하는 필드
- Data Field: 실제 전송할 데이터 (0~8 바이트)
- CRC Field: 오류 검출을 위한 체크섬
- ACK Field: 수신 확인을 위한 필드
- EOF(End of Frame): 프레임의 끝을 나타내는 필드
CAN 통신은 1986년 Bosch가 처음 도입한 이후로 자동차 산업에서 핵심적인 통신 프로토콜로 자리잡았으며, 높은 신뢰성과 실시간성을 바탕으로 현재까지도 차량용 네트워크의 중추적인 역할을 담당하고 있습니다. 최근에는 인포테인먼트 시스템이나 자율주행 같은 대용량 데이터 처리가 필요한 분야에서 차량용 이더넷이 많이 도입되고 있지만, 엔진 제어, 브레이크 시스템, 에어백 등 차량의 안전과 직결되는 핵심 부품들의 제어에는 여전히 검증된 안정성과 신뢰성을 가진 CAN 통신이 널리 사용되고 있습니다. 앞으로도 CAN 통신은 차량 내부의 중요한 실시간 제어 시스템에서 핵심적인 역할을 계속할 것으로 예상됩니다.
'Network' 카테고리의 다른 글
| CAN TP (ISO-TP) 프로토콜의 정의와 구조 (0) | 2024.09.07 |
|---|---|
| CAN DBC 파일을 코드로 변환하는 오픈소스 (0) | 2024.08.10 |

